Running Simulations in Gazebo¶
Rosflight comes with a useful tool allowing it to perform software-in-the-loop (SIL) simulations of the ROSflight firmware in gazebo.
Architecture of the SIL Simulation¶
To best mimic the hardware experience of ROSflight, the SIL plugin for Gazebo actually implements the firmware source code as a library. We just implemented a different "board layer" which uses gazebo instead of hardware calls for things like imu_read() and pwm_write(). Instead of a serial link over USB to the flight controller, we use a UDP connection bouncing off of localhost to communicate between rosflight_io and the firmware. This means the interface to the SIL plugin is identical to that of hardware. rosflight_io is the main gateway to the firmware in simulation, just as it is in hardware.
The following table summarizes the correlation between connections in hardware and simulation:
| Connection Type | Hardware | Simulation |
|---|---|---|
Serial communications to rosflight_io |
USB / UART | UDP |
| RC | PPM Receiver | ROS RC topic (rosflight_msgs/RCRaw) |
| Motors | PWM | Gazebo Plugin |
| Sensors | SPI/I2C | Gazebo Plugin |
Quick-Start Guide to SIL Simulation¶
-
create a catkin workspace
-
clone the
rosflightmetapackage repository from github into your workspace -
clone submodules of the
rosflightmetapackage:git submodule update --init --recursive -
clone the
rosflight_joymetapackage repository from github into your workspace -
install pygame:
pip install --user pygame -
Perform a
catkin_make -
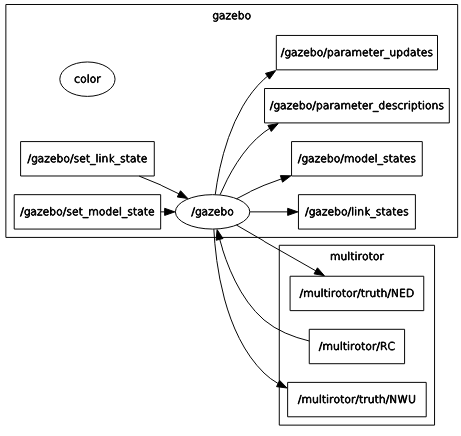
roslaunch rosflight_sim multirotor.launch- This will open up a gazebo simulation, and you should have the followingrqt_graph
- At this point, you can't actually do anything because there is no RC connection and no
rosflight_ioto talk to the firmware. Let's start by running arosflight_ionode. In a separate terminal, runrosrun rosflight rosflight_io _udp:=true.- The
udpparameter tellsrosflight_ioto simulate a serial connection over UDP rather than using the USB connection to hardware
- The
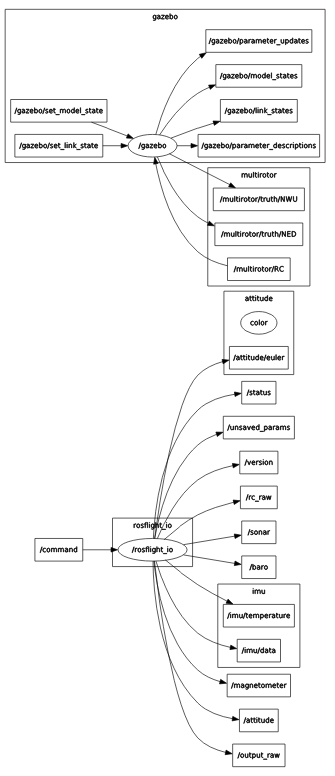
Your rqt_graph should look something like the following image. This looks funny because ROS doesn't actually know that there is a UDP connection between rosflight_io and gazebo. There is one, though, and you can test it by echoing any of the topics published by rosflight_io.
- Spin up a simulated RC connection. The easiest way to do this is with the helper package
rosflight_joy. Connect a joystick to the computer (or Taranis transmitter) and runrosrun rosflight_joy rc_joy RC:=/multirotor/RC. This simulates the RC connection in hardware. If everything is mapped correctly, you should now be able to arm, disarm and fly the aircraft in simulation!
Note
It is much easier to fly with a real transmitter than with an Xbox-type controller. FrSky Taranis and RealFlight transmitters and interlinks are also supported. Non-Xbox joysticks may have incorrect mappings. If your joystick does not work, and you write your own mapping, please contribute back your new joystick mapping!
Remember, the SIL tries its best to replicate hardware. That means you have to calibrate and set parameters in the same way you do in hardware. See the Hardware Setup and Parameter Configuration pages in this documentation for instructions on how to perform all preflight configuration before the aircraft will arm.
As a quick help, here is a roslaunch file which quickly does all the above rosrun steps automatically:
<launch>
<arg name="mav_name" value="multirotor"/>
<arg name="color" default="White"/>
<arg name="x" default="0"/>
<arg name="y" default="0"/>
<arg name="z" default="0.2"/>
<arg name="yaw" default="0"/>
<arg name="paused" default="false"/>
<arg name="gui" default="true"/>
<arg name="verbose" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find rosflight_sim)/launch/base.launch">
<arg name="mav_name" value="$(arg mav_name)"/>
<arg name="color" value="$(arg color)"/>
<arg name="x" value="$(arg x)"/>
<arg name="y" value="$(arg y)"/>
<arg name="z" value="$(arg z)"/>
<arg name="yaw" value="$(arg yaw)"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="verbose" value="$(arg verbose)"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="xacro_file" value="$(find rosflight_sim)/xacro/multirotor.urdf.xacro"/>
<arg name="param_file" value="$(find rosflight_sim)/params/multirotor.yaml"/>
</include>
<node name="rosflight_io" pkg="rosflight" type="rosflight_io" output="screen">
<param name="udp" value="true"/>
</node>
<node name="rc_joy" pkg="rosflight_joy" type="rc_joy">
<remap from="RC" to="multirotor/RC"/>
</node>
</launch>
To simulate a fixed-wing mav, just change all instances of multirotor in the above steps to fixedwing.